

Engineering Mathematics Questions And Answers
If the difference between the mode and median is 2, then find the difference between the median and mean(in the given order).
- 2
- 1
- 3
- 4
Answer (Detailed Solution Below)
Option 2 : 1
Concept:
Relation between mode, median and mean is given by:
Mode = 3 × median – 2 × mean
Calculation:
Given:
Mode – median = 2
As we know
Mode = 3 × median – 2 × mean
Now, Mode = median + 2
⇒ (2 + median) = 3median – 2mean
⇒ 2Median - 2Mean = 2
⇒ Median - Mean = 1
∴ The difference between the median and mean is 1.
Consider the below data:
\(\begin{array}{*{20}{c}} x&:&0&1&2\\ {f\left( x \right)}&:&4&3&{12} \end{array}\)
The value of\(\mathop \smallint \nolimits_0^2 f\left( x \right)dx\) by Trapezoidal rule will be:
- 11
- 12
- 15
- 9
Answer (Detailed Solution Below)
Option 1 : 11
Concept:
Trapezoidal rule states that for a function y = f(x)
| x | x0 | x1 | x2 | x3 | …… | xn |
| y | y0 | y1 | y2 | y3 | …… | yn |
xn = x0 + nh, where n = Number of sub-intervals
h = step-size
\(\mathop \smallint \nolimits_{{x_0}}^{{x_0} + nh} f\left( x \right)dx = \frac{h}{2}\left[ {\left( {{y_0} + {y_n}} \right) + 2\left( {{y_1} + {y_2} + {y_3} + \ldots + {y_{n - 1}}} \right)} \right]\) ---(1)
For a trapezoidal rule, a number of sub-intervals must be a multiple of 1.
Calculation:
\(\begin{array}{*{20}{c}} x&:&0&1&2\\ {f\left( x \right)}&:&4&3&{12} \end{array}\)
Here: x0 = 4, x1 = 3, x2 = 12, h = 1
From equation (1);
\(\mathop \smallint \limits_0^2 f\left( x \right)dx = \frac{h}{2}\left[ {\left( {{x_0} + {x_2}} \right) + 2\left( {{x_1}} \right)} \right]\)
\( = \frac{1}{2}\left[ {\left( {{4} + {12}} \right) + 2\left( {{3}} \right)} \right]={22\over2}=11\)
Key Points:
Apart from the trapezoidal rule, other numerical integration methods are:
Simpson's one-third rule:
For applying this rule, the number of subintervals must be a multiple of 2.
\(\mathop \smallint \nolimits_{{x_0}}^{{x_0} + nh} f\left( x \right)dx = \frac{h}{3}\left[ {\left( {{y_0} + {y_n}} \right) + 4\left( {{y_1} + {y_3} + {y_5} + \ldots + {y_{n - 1}}} \right) + 2\left( {{y_2} + {y_4} + {y_6} + \ldots + {y_{n - 2}}} \right)} \right]\) ..2)
Simpson's three-eighths rule:
For applying this rule, the number of subintervals must be a multiple of 3.
\(\mathop \smallint \nolimits_{{x_0}}^{{x_0} + nh} f\left( x \right)dx = \frac{{3h}}{8}\left[ {\left( {{y_0} + {y_n}} \right) + 3\left( {{y_1} + {y_2} + {y_4} + {y_5} + \ldots } \right) + 2\left( {{y_3} + {y_6} + \ldots } \right)} \right]\)
A bag contains 3 white, 2 blue and 5 red balls. One ball is drawn at random from the bag. What is the probability that the ball drawn is not red?
- 3/10
- 1/5
- 1/2
- 4/5
Answer (Detailed Solution Below)
Option 3 : 1/2
Calculation:
A bag contains 3 white, 2 blue and 5 red balls.
Total number of balls = 3 + 2 + 5 = 10
Number of balls that are not red = 10 - 5 = 5
Probability of balls drawn is not red = (number of balls which are not red)/(total number of balls) = 5/10 = 1/2
For what value of λ, do the simultaneous equation 2x + 3y = 1, 4x + 6y = λ have infinite solutions?
- λ = 0
- λ = 1
- λ ≠ 2
- λ = 2
Answer (Detailed Solution Below)
Option 4 : λ = 2
Concept:
Non-homogeneous equation of type AX = B has infinite solutions;
if ρ(A | B) = ρ(A) < Number of unknowns
Calculation:
Given:
2x + 3y = 1
4x + 6y = λ
The augmented matrix is given by:
\(\left( {A{\rm \ {|}} \ B} \right) = \left[ {\begin{array}{*{20}{c}} 2&3&{1\;}\\ 4&6&\lambda \end{array}} \right]\)
Applying R2 → R2 – 2R1
\(\left( {A{\rm \ {|}} \ B} \right) = \left[ {\begin{array}{*{20}{c}} 2&3&{1\;}\\ 0&0&{\lambda - 2} \end{array}} \right]\)
For the system to have infinite solutions, the last row must be a fully zero row.
So if λ = 2 then the system of equations has infinitely many solutions.
Key Points:
Remember the system of equations
AX = B have
1) Unique solution, if ρ(A : B) = ρ(A) = Number of unknowns.
2) Infinite many solutions, if ρ(A : B) = ρ(A) < Number of solutions
3) No solution, if ρ(A : B) ≠ ρ(A).
The value of\(\mathop {\lim }\limits_{x \to 0} \left( {x\sin \frac{1}{x}} \right)\) is:
- ∞
- - 1
- 0
- 1
Answer (Detailed Solution Below)
Option 3 : 0
Concept:
sin θ can take from - ∞ to + ∞but sin θ gives - 1 to + 1, i.e. for values of θ from-∞ to+∞, sin θ always lies between -1 and 1.
\( - 1 \le \sin θ \le 1\)
sin ∞ gives finite value.
Analysis:
Let,
\(f(x)=\mathop {\lim }\limits_{x \to 0} \left( {x\sin \frac{1}{x}} \right)\)
When x = 0
f(x) = 0 × sin ∞
f(x) = 0 × Finite value
\(f(x)=\mathop {\lim }\limits_{x \to 0} \left( {x\sin \frac{1}{x}} \right)=0\)
The differential equation 2y dx – (3y – 2x) dy = 0 is
- exact and homogenous but not linear
- exact, homogenous and linear
- exact and linear but not homogenous
- homogenous and linear but not exact
Answer (Detailed Solution Below)
Option 2 : exact, homogenous and linear
Concept:
Homogenous equation: If the degree of all the terms in the equation is the same then the equation is termed as a homogeneous equation.
Exact equation: The necessary and sufficient condition of the differential equation M dx + N dy = 0 to be exact is:
\(\frac{{\partial M}}{{\partial y}} = \frac{{\partial N}}{{\partial x}}\)
Linear equation: A differential equation is said to be linear if the dependent variable and its differential coefficient only in the degree and not multiplied together.
The standard form of a linear equation of the first order, commonly known as Leibnitz's linear equation is:
\(\frac{{dy}}{{dx}}+Py=Q\)
where, P, Q is a function of x.
or,\(\frac{{dx}}{{dy}}+Px=Q\)
where, P, Q is a function of x.
Condition 1:
2y dx + (2x - 3y) dy = 0 ---.(1)
(It is Homogeneous)
Condition 2:
Equation (1) can be written as \(\frac{{dy}}{{dx}}=\frac{{2y}}{{2x\;-\;3y}}\) .
It is not a linear form.
or\(\frac{{dx}}{{dy}}=\frac{{2x-3y}}{{2y}}\)
\(\frac{{dx}}{{dy}}+\frac{{x}}{{y}}=\frac{{3}}{{2}}\)
It is in linear form
Condition 3:
M dx + N dy = 0
2y dx – (3y – 2x) dy = 0
hence, M = 2y and N = 2x - 3y
\(\frac{{\partial M}}{{\partial y}} =\frac{{\partial (2y)}}{{\partial y}}= 2\) and\(\frac{{\partial N}}{{\partial x}}= \frac{{\partial (2x+3y)}}{{\partial x}}=2\)
As\(\frac{{\partial M}}{{\partial y}}=\frac{{\partial N}}{{\partial y}}\)
so, it is an exact equation.
If Rank (A) = 2 and Rank (B) = 3 then Rank (AB) is:
- 6
- 5
- 3
- Data inadequate
Answer (Detailed Solution Below)
Option 4 : Data inadequate
Concept:
Rank:
The rank of a matrix is a number equal to the order of the highest order non-vanishing minor, that can be formed from the matrix.
For matrix A,it is denoted by ρ(A).
The rank of a matrix is said to be r if,
- There is at least one non-zero minor of order r.
- Every minor of matrix Ahaving order higher than r is zero.
Property of Rank of Matrix:
ρ(AB) ≤ min [ρ(A), ρ(B)]
Calculation:
Given:
ρ(A) = 2, ρ(B) = 3
Using properties
ρ(AB) ≤ min [ρ(A), ρ(B)]
ρ(AB) ≤ min (2,3)
⇒ ρ(AB) ≤ 2
 Alternate Method
Alternate Method
Let order of matrix A be 2 × m and order of matrix B be m × 3 (∵ for multiplication we need the column of A and row of B to be same)
∴ Order of matrix AB will be 2 × 3
Using properties
ρ(AB) ≤ min (Row, Column)
⇒ ρ(AB) ≤ min (2, 3) [only when the column of A and row of B is the same]
⇒ ρ(AB) ≤ 2.
∵ we don't know the dimension of A and B, we cannot predict the exact rank of AB but its maximum rank will be 2.
 Important Points
Important Points
Other properties of rank of a matrix are:
- The rank of a matrix does not change by elementary transformation, we can calculate the rank by changing the matrix into Echelon form. In the Echelon form, the rank of a matrix is the number of non-zero rows of the matrix.
- The rank of a matrix is zero if the matrix is null.
- ρ(A) ≤ min (Row, Column)
- ρ(AB) ≤ min [ρ(A), ρ(B)]
- ρ(ATA) = ρ(A AT) = ρ(A) = ρ(AT)
- If A and B are matrices of the same order, then ρ(A + B) ≤ ρ(A) + ρ(B) and ρ(A - B) ≥ ρ(A) - ρ(B).
- If Aθis the conjugate transpose of A, then ρ(Aθ) = ρ(A) and ρ(A Aθ) = ρ(A).
- The rank of a skew-symmetric matrix cannot be one.
The standard ordered basis of R3 is {e1, e2, e3} Let T : R3 → R3 be the linear transformation such that T(e1) = 7e1 - 5e3, T (e2) = -2e2 + 9e3, T(e3) = e1 + e2 + e3. The standard matrix of T is:
- \(\left( {\begin{array}{*{20}{c}} 7&0&1\\ 0&{ - 2}&1\\ { - 5}&9&1 \end{array}} \right)\)
- \(\left( {\begin{array}{*{20}{c}} 7&-2&1\\ -5&{ 9}&1\\ { 0}&0&1 \end{array}} \right)\)
- \(\left( {\begin{array}{*{20}{c}} 7&0&-5\\ 0&{ - 2}&9\\ 1&1&1 \end{array}} \right)\)
- \(\left( {\begin{array}{*{20}{c}} 7&-5&0\\ -2&{ 9}&1\\ { 1}&1&1 \end{array}} \right)\)
Answer (Detailed Solution Below)
Option 1 : \(\left( {\begin{array}{*{20}{c}} 7&0&1\\ 0&{ - 2}&1\\ { - 5}&9&1 \end{array}} \right)\)
Concept:
Matrix transformations:
Theorem: Suppose L: Rn → Rm is a linear map. Then there exists an m×n matrix A such that L(x) = Ax for all x ∈ Rn. Columns of A are vectors L(e1), L(e2), . . . , L(en), where e1, e2, . . . , en is the standard basis for Rn.
Calculation:
Given linear transformation are:
T(e1) = 7e1 - 5e3,
T(e2) = -2e2 + 9e3,
T(e3) = e1 + e2 + e3
Let the standard matrix be A with respect to the basis e1, e2, e3,
Now T(e1) = 7e1 + 0e2 - 5e3,
T(e2) = 0e1 -2e2 + 9e3,
T(e3) = e1 + e2 + e3.
The standard matrix will be (transpose of linear combinations)
\(\left( {\begin{array}{*{20}{c}} 7&0&1\\ 0&{ - 2}&1\\ { - 5}&9&1 \end{array}} \right)\)
The value of\(\mathop \smallint \nolimits_0^{2\pi } \mathop \smallint \nolimits_0^{\pi /4} \mathop \smallint \nolimits_0^1 {r^2}\sin \theta dr\;d\theta \;d\phi \) will be:
- \(\frac{{\sqrt 2{\pi } }}{3}\left( {\sqrt 2 + \sqrt 3 } \right)\)
- \(\frac{{{2\pi } }}{3}\left( {\sqrt 3 -1 } \right)\)
- \(\frac{{ {2\pi } }}{3}\left( {\sqrt 2 - \sqrt 3 } \right)\)
- \(\frac{{\sqrt 2{\pi } }}{3}\left( {\sqrt 2 -1 } \right)\)
Answer (Detailed Solution Below)
Option 4 : \(\frac{{\sqrt 2{\pi } }}{3}\left( {\sqrt 2 -1 } \right)\)
\(\mathop \smallint \nolimits_0^{2\pi } \mathop \smallint \nolimits_0^{\pi /4} \mathop \smallint \nolimits_0^1 {r^2} \sin \theta drd\theta d\phi \)
=\( \mathop \smallint \limits_0^{2\pi } \mathop \smallint \limits_0^{\frac{\pi }{4}} \mathop \smallint \limits_0^1 \left( {{r^2} \times dr} \right) \times \sin \theta d\theta d\phi \)
=\(\mathop \smallint \limits_0^{2\pi } \mathop \smallint \limits_0^{\frac{\pi }{4}} \left[ {\frac{{{r^3}}}{3}} \right]_0^1 \times \sin \theta d\theta d\phi \)
=\( \frac{1}{3}\mathop \smallint \limits_0^{2\pi } \mathop \smallint \limits_0^{\frac{\pi }{4}} \sin \theta \times d\theta \times d\phi \)
=\(\frac{1}{3}\mathop \smallint \limits_0^{2\pi } - \left[ {\cos \theta } \right]_0^{\frac{\pi }{4}} \times d\phi \)
=\( \frac{1}{3}\mathop \smallint \limits_0^{2\pi } - \left[ {\frac{1}{{\sqrt 2 }} - 1} \right] \times d\phi \)
=\(\frac{1}{{3\sqrt 2 }}\left[ {\sqrt 2 \phi - \phi } \right]_0^{2\pi }\)
=\(\frac{{2\pi }}{{3\sqrt 2 }}\left[ {\sqrt 2 - 1} \right]\)
=\(\frac{{\sqrt 2{\pi } }}{3}\left( {\sqrt 2 -1 } \right)\)
A complete solution of partial differential equation\(\frac {\partial z}{\partial x} - 3x^2 = \left(\frac {\partial z}{\partial y}\right)^2 - y\) will be ________, where a and b are arbitrary constants.
- z2 = ax2 + by2 + 1
- \(z = ax + x^3 + \left(\frac 2 3\right) (a + y)^{\frac 3 2} + b\)
- z1 / 2 = (x + a)1 / 2 + (y + b)1 / 2
- z = (ax2 + by2)3 / 2 + 2
Answer (Detailed Solution Below)
Option 2 : \(z = ax + x^3 + \left(\frac 2 3\right) (a + y)^{\frac 3 2} + b\)
Concept:
Separable equation of the form f(x, p) = g(y, q)
Let f(x, p) = g(y, q) = a (constant)
Solve f(x, p) = a and g(y, q) = a for p and q, we get
p = ϕ(x, a) and q = ψ(y, a)
We have dz = p dx + q dy
Bu integration, we get the required solution as follows,
z = ∫ ϕ(x, a) dx + ∫ ψ(y, a) dy + b
Where a, b are arbitrary constants.
Calculation:
Given Partial differentiation equation is\(\frac {\partial z}{\partial x} - 3x^2 = \left(\frac {\partial z}{\partial y}\right)^2 - y\)
Writing in terms of p,q ⇒ p - 3x2 = q2 - y
Let p - 3x2 = q2 - y = a (constant)
Now p - 3x2 = a ⇒ p = 3x2 + a
q2 - y = a ⇒\(q = \sqrt {y+a}\)
Substituting the values of p and q in dz = p dx + q dy, we get
\(dz = (a+3x^2)dx + (\sqrt {y+a})dy \)
Integrating on both sides, we get the general solution as
\(z = ax + x^3 + \left(\frac 2 3\right) (a + y)^{\frac 3 2} + b\)
For the curve xy3 - yx3 = 6, the slope of the tangent line at the point (1, -1) is:
- 1 / 2
- -1
- 2
- 1
Answer (Detailed Solution Below)
Option 2 : -1
Concept :
Let y = f(x) be the equation of a curve, then the slope of the tangent at any point say (x1, y1) is given by:
\(m = {\left[ {\frac{{dy}}{{dx}}} \right]_{\left( {{x_1},\;\;{y_1}} \right)}}\)
Calculation:
Given curve is xy3 - yx3 = 6
Now by partially differentiating the equation of curve with respect to x we get;
\(3xy^2\frac{dy}{dx}+y^3-3x^2y-x^3\frac{dy}{dx}=0\)
\(\frac{dy}{dx}({3xy^2-x^3})={3x^2y-y^3}\)
\(\frac{dy}{dx}=\frac{3x^2y-y^3}{3xy^2-x^3}\)
\(\frac{dy}{dx}=\frac{y(3x^2-y^2)}{x{(3y^2-x^2)}}\)
The slope(m) i.e. dy/dx of the tangent at (1, -1) is:
m = -1
A partial differential equation derived from the equation z = aeby sinbx will be:
- \(\frac{{\partial z}}{{\partial y}} = 2y{\left( {\frac{{\partial z}}{{\partial x}}} \right)^2}\)
- \(\left( {1 + \frac{{\partial z}}{{\partial y}}} \right)\frac{{\partial z}}{{\partial x}} = z\)
- \(\frac{{{\partial ^2}z}}{{\partial {x^2}}} + \frac{{{\partial ^2}z}}{{\partial {y^2}}} = 0\)
- \(2z = x\frac{{\partial z}}{{\partial x}} + y\frac{{\partial z}}{{\partial y}}\)
Answer (Detailed Solution Below)
Option 3 : \(\frac{{{\partial ^2}z}}{{\partial {x^2}}} + \frac{{{\partial ^2}z}}{{\partial {y^2}}} = 0\)
z = aeby sinbx
Now by differentiating w.r.t. x we get:
\(\frac{{\partial z}}{{\partial x}} = a \times {e^{by}} \times \cos bx \times b\)
Again differentiating:
\( \frac{{{\partial ^2}z}}{{\partial {x^2}}} = - a \times {b^2} \times {e^{by}} \times \sin bx\) ----(1)
z = aeby sinbx
Now by differentiating w.r.t. y we get:
\(\frac{{\partial z}}{{\partial y}} = a \times \sin bx \times {e^{by}} \times b\)
Again differentiating:
\( \frac{{{\partial ^2}z}}{{\partial {y^2}}} = a \times {b^2} \times {e^{by}} \times \sin bx\) ----(2)
Now by adding (1) and (2) we get:
\(\frac{{{\partial ^2}z}}{{\partial {x^2}}} + \frac{{{\partial ^2}z}}{{\partial {y^2}}} = 0\)
Hence, Option 3 is correct.
The value of x for which of the following series converges is
\(x - \frac{{{x^2}}}{2} + \frac{{{x^3}}}{3} - \frac{{{x^4}}}{4} + \frac{{{x^5}}}{5} - \ldots \infty ,\)
- The series converges f0r -1< x< 1
- The series converges for -1 < x< 1
- The series diverges for -1 < x < 1
- The series converges for x > 1
Answer (Detailed Solution Below)
Option 2 : The series converges for -1 < x
<1
Explanation:
Given series is,
\(x - \frac{{{x^2}}}{2} + \frac{{{x^3}}}{3} - \frac{{{x^4}}}{4} + \frac{{{x^5}}}{5} - \ldots \infty ,\)
\({u_n} = {\left( { - 1} \right)^{n - 1}}\frac{{{x^n}}}{n}\)
\({u_{n + 1}} = {\left( { - 1} \right)^n}\frac{{{x^{n + 1}}}}{{n + 1}}\)
\(\frac{{{u_{n + 1}}}}{{{u_n}}} = \frac{{ - n}}{{n + 1}}x\)
\(\mathop {{\rm{lt}}}\limits_{n \to \infty } \left| {\left. {\frac{{{u_n} + 1}}{{{u_{n\;\;}}}}} \right| = \mathop {{\rm{lt}}}\limits_{n \to \infty } \left( {\frac{n}{{n + 1}}} \right)\left( {\left| x \right|} \right)} \right.\)
\(= \left| x \right|\)
By ratio test, the given series converges for |x| < 1 and diverges for |x| > 1
Let us examine the series for x = ± 1
For x = 1, the series reduces to
\(1 - \frac{1}{2} + \frac{1}{3} - \frac{1}{4} + \frac{1}{5} + \ldots\)
This is an alternating series and is convergent.
For x = -1 the series becomes
\(- \left( {1 + \frac{1}{2} + \frac{1}{3} + \frac{1}{4} + \frac{1}{5} + \ldots } \right)\)
This is a divergent series as can be seen by comparison with P-series with P = 1
Hence the given series is converges for -1 < x
<1
The value of\(\mathop {\lim }\limits_{x \to 2} \frac{{{x^2} - 4}}{{3x - 6}}\) is:
- \(\frac1 3\)
- \(\frac 4 3\)
- 1
- \(\frac 2 3\)
Answer (Detailed Solution Below)
Option 2 : \(\frac 4 3\)
Concept :
L-Hospital Rule: Let f(x) and g(x) be two functions
Suppose that we have one of the following cases,
I.\(\mathop {\lim }\limits_{{\rm{x}} \to {\rm{a}}} \frac{{{\rm{f}}\left( {\rm{x}} \right)}}{{{\rm{g}}\left( {\rm{x}} \right)}} = \frac{0}{0}\)
II.\(\mathop {\lim }\limits_{{\rm{x}} \to {\rm{a}}} \frac{{{\rm{f}}\left( {\rm{x}} \right)}}{{{\rm{g}}\left( {\rm{x}} \right)}} = \frac{\infty }{\infty }\)
Then we can apply L-Hospital Rule ⇔\(\mathop {\lim }\limits_{{\bf{x}} \to {\bf{a}}} \frac{{{\bf{f}}\left( {\bf{x}} \right)}}{{{\bf{g}}\left( {\bf{x}} \right)}} = \mathop {\lim }\limits_{{\bf{x}} \to {\bf{a}}} \frac{{{\bf{f}}'\left( {\bf{x}} \right)}}{{{\bf{g}}'\left( {\bf{x}} \right)}}\)
Calculation:
Given:
\(\mathop {\lim }\limits_{x \to 2} \frac{{{x^2} - 4}}{{3x - 6}}\)
As we can see,\(\mathop {\lim }\limits_{x \to 2} \frac{{{x^2} - 4}}{{3x - 6}}=\frac{0}{0}\)
So, Apply the L-Hospital rule here,
\(\mathop {\lim }\limits_{x \to 2} \frac{{{2x} }}{{3}}\)
After putting the limit we'll get:
\(\mathop {\lim }\limits_{x \to 2} \frac{{{2x} }}{{3}}=\frac{4}{3}\)
Hence the required value of the limit is\(\frac4 3\).
\(\mathop {\lim }\limits_{x \to 0} \frac{{\cos x - 1}}{{\sin x - x}}\) is equal to
- Undefined
- ∞
- 1
- 0
Answer (Detailed Solution Below)
Option 2 : ∞
Concept:
L-Hospital Rule: Let f(x) and g(x) be two functions
Suppose that we have one of the following cases,
I.\(\mathop {\lim }\limits_{{\rm{x}} \to {\rm{a}}} \frac{{{\rm{f}}\left( {\rm{x}} \right)}}{{{\rm{g}}\left( {\rm{x}} \right)}} = \frac{0}{0}\)
II.\(\mathop {\lim }\limits_{{\rm{x}} \to {\rm{a}}} \frac{{{\rm{f}}\left( {\rm{x}} \right)}}{{{\rm{g}}\left( {\rm{x}} \right)}} = \frac{\infty }{\infty }\)
Then we can apply L-Hospital Rule as:
\(\mathop {\lim }\limits_{{\bf{x}} \to {\bf{a}}} \frac{{{\bf{f}}\left( {\bf{x}} \right)}}{{{\bf{g}}\left( {\bf{x}} \right)}} = \mathop {\lim }\limits_{{\bf{x}} \to {\bf{a}}} \frac{{{\bf{f}}'\left( {\bf{x}} \right)}}{{{\bf{g}}'\left( {\bf{x}} \right)}}\)
Calculation:
Given:
\(\mathop {{\rm{lim}}}\limits_{x \to 0} \frac{{cos\;x\; -\;1}}{{sin\;x\; - \;x}} = \left( {\frac{0}{0}} \right)\) form
Applying L' Hospital rule:
\(\mathop {{\rm{lim}}}\limits_{x \to 0} \frac{{cos\;x - 1}}{{sin\;x-\;x}} =\mathop {{\rm{lim}}}\limits_{x \to 0} \frac{\frac{d}{dx}({cos\;x\; -\;1})}{{\frac{d}{dx}(sin\;x\;-\;x})} =\mathop {\lim }\limits_{{\rm{x}} \to 0} \frac{{-sin\;x {\rm{}}}}{{\cos {\rm{x}\;-\;1}}} \)
\(\mathop {\lim }\limits_{{\rm{x}} \to 0} \frac{{-sin\; {\rm{x}}}}{{\cos {\rm{x}\,-1\;}}} = \left( {\frac{0}{0}} \right){\rm{form}}\)
Once again by L' Hospital rule,
\({\rm{}}\mathop {\lim }\limits_{{\rm{x}} \to 0} \frac{{-cos\; {\rm{x}}}}{{{\rm{-sin~x}}}} = \frac{-1}{0} = \infty{\rm{}}\)
If A is \(\left[ {\begin{array}{*{20}{c}} 8&5\\ 7&6 \end{array}} \right]\) then the value of |A121 - A120|
- 0
- 1
- 120
- 121
Answer (Detailed Solution Below)
Option 1 : 0
Concept:
Let B = |A121 - A120|
B = |A120 × (A – I)|
B = |A120| × |A – I|
Calculation:
A =\(\left[ {\begin{array}{*{20}{c}} 8&5\\ 7&6 \end{array}} \right]\)
Now, calculating matrix [A – I]
[A – I] = \(\left[ {\begin{array}{*{20}{c}} 8&5\\ 7&6 \end{array}} \right] - {\rm{\;}}\left[ {\begin{array}{*{20}{c}} 1&0\\ 0&1 \end{array}} \right]\)
[A – I] = \(\left[ {\begin{array}{*{20}{c}} 7&5\\ 7&5 \end{array}} \right]\)
Now determinant of |A – I|,
|A – I| = \(\left| {\begin{array}{*{20}{c}} 7&5\\ 7&5 \end{array}} \right|\)
|A – I| = 0 (Since two rows are repeated, therefore determinant = 0)
Hence, |A121 - A120 | = 0
The general solution of partial differential equation
\(x\left( {{y^2} + z} \right)\frac{{\partial z}}{{\partial x}} - y\left( {{x^2} + z} \right)\frac{{\partial z}}{{\partial y}}=\left( {{x^2} - {y^2}} \right)z\) will be:
- φ(xyz, x2 + y2 - 2z) = 0, where φ is an arbitrary function.
- φ(x + y + z,x2 + y2) = 0, where φ is an arbitrary function.
- φ(x2 + y2 + z2, x + y + z) = 0 where φ is an arbitrary function
- φ(x + y - z, xy + yz + zx) = 0, where φ is an arbitrary function
Answer (Detailed Solution Below)
Option 1 : φ(xyz, x2 + y2 - 2z) = 0, where φ is an arbitrary function.
Concept:
Linear Partial Differential Equation of First Order:A linearpartial differential equationof the first order, commonly known as Lagrange's Linear equation, is of the form Pp + Qq = R where P, Q, and R are functions of x, y, z. This equation is called a quasi-linear equation.
Thus, to solve the equation of the form Pp + Qq = R, we have to follow this solution procedure:
1) Form the subsidiary equations as:
\(\frac {dx}{P} = \frac {dy}{Q} = \frac {dz}{R}\)
2) Solve any two simultaneous equations by any method giving u = a and v = b as its solutions.
3) Write the complete solution as φ (u, v) = 0 or u = f (v).
Lagrange's method of multipliers:
Consider the partial differentiation equation Pp + Qq = R
then auxiliary equations are given by:
\(\frac {dx}{P} = \frac {dy}{Q} = \frac {dz}{R}\)
Now choose multipliers P1, Q1, R1 in such a way that in ratio
\(\frac {{{P_1}{dx}}+{{Q_1}{dy}}+{{R_1}{dz}}}{{{P_1}{P}}+{{Q_1}{Q}}+{{R_1}{R}}}\), denominators vanish.
⇒ P1 dx + Q1 dy + R1 dz = 0
By integration, the solution is given by u (x, y, z) = c1
Similarly, by choosing another set of multipliers, function v(x, y, z) is determined.
Then complete solution is given by f (u, v) = 0.
Calculation:
Given:
\(x\left( {{y^2} + z} \right)\frac{{\partial z}}{{\partial x}} - y\left( {{x^2} + z} \right)\frac{{\partial z}}{{\partial y}}=\left( {{x^2} - {y^2}} \right)z\)
Comparing with Pp + Qq = R,
P = x (y2 + z); Q = -y (x2 + z); R = (x2 - y2) z;
∴ The auxiliary equations are:
\(\frac{{{\rm{dx}}}}{{{\rm{x\;}}\left( {{\rm{y^2}} + {\rm{z}}} \right){\rm{\;}}}} = \frac{{{\rm{dy}}}}{{{\rm{\;-y\;}}\left( {{\rm{x^2}} + {\rm{z}}} \right){\rm{\;}}}} = \frac{{{\rm{dz}}}}{{{\rm{z\;}}\left( {{\rm{x^2}} - {\rm{y^2}}} \right)}}\)
1st function:
Using multipliers x, y and -1 ⇒
\({\rm{\;}}\frac{{{\rm{xdx}} + {\rm{ydy}} - {\rm{dz}}}}{{{\rm{x^2\;}}\left( {{\rm{y^2}} + {\rm{z}}} \right) - {\rm{\;y^2\;}}\left( {{\rm{x^2}} + {\rm{z}}} \right) - {\rm{z\;}}\left( {{\rm{x^2}} - {\rm{y^2}}} \right)}} = \frac{{{\rm{xdx}} + {\rm{ydy}} - {\rm{dz}}}}{0}\)
∴ x dx + y dy - dz = 0 ⇒ x2 + y2 - 2z = constant;
2nd function:
Using multipliers 1/x, 1/y and 1/z
⇒\({\rm{\;}}\frac{{{\rm{{\frac{1}{x}}dx}} + {\rm{{\frac{1}{y}}dy}} + {\rm{{\frac{1}{z}}dz}}}}{{\left( {{\rm{y^2}} + {\rm{z}}} \right) - \left( {{\rm{x^2}} + {\rm{z}}} \right) + \left( {{\rm{x^2}} - {\rm{y^2}}} \right)}} \)
\(= \frac{{{\rm{{\frac{1}{x}}dx}} + {\rm{{\frac{1}{y}}dy}} + {\rm{{\frac{1}{z}}dz}}}}{0}\)
∴\({{\rm{{\frac{1}{x}}dx}} + {\rm{{\frac{1}{y}}dy}} + {\rm{{\frac{1}{z}}dz}}} = 0 \)
xyz = constant
So both the equations are:
x2 + y2 - 2z = constant; xyz = constant;
Complete solution isφ(xyz, x2 + y2 - 2z) = 0, where φ is an arbitrary function.
A matrix X has a dimension of 2 × 2. If the eigenvalues of this matrix is 5 and 6, what would be the eigen values of X2?
- 2.5 and 3
- 5 and 6
- 10 and 12
- 25 and 36
Answer (Detailed Solution Below)
Option 4 : 25 and 36
Concept:
If A is any square matrix of order n, we can form the matrix [A – λI], where I is the nth order unit matrix. The determinant of this matrix equated to zero i.e. |A – λI| = 0 is called the characteristic equation of A.
The roots of the characteristic equation are called Eigenvalues or latent roots or characteristic roots of matrix A.
Properties of Eigenvalues:
(1) If λ is an eigenvalue of a matrix A, then λn will be an eigenvalue of a matrix An.
(2) If λ is an eigenvalue of a matrix A, then kλ will be an eigenvalue of a matrix kA where k is a scalar.
(3) Sum of eigenvalues is equal to the trace of that matrix.
(4) The product of Eigenvalues of a matrix A is equal to the determinant of that matrix A.
(5) If λ is an Eigenvalue of matrix A, then λ2 will be an Eigenvalue of matrix A2.
(6) If λ1 is an Eigenvalue of matrix A, then (λ1 + 1) will be an Eigenvalue of the matrix (A + I).
(7) Eigenvalues of a matrix and its transpose are the same because the transpose matrix will also have the same characteristic equation.
Calculation:
If λ1, λ2, λ3 …. λ4 are the given values of A, then
eigenvalues of Amwill be\(\lambda _1^m,\lambda _2^m,\lambda _3^m, \ldots \ldots ..\)
'S' matrix has eigenvalues 5 and 6.
S2 matrix has eigenvalues 52 and 362
i.e. 25 and 36.
The approximate solution of the system of simultaneous equations
2x - 5y + 3z = 7
x + 4y - 2z = 3
2x + 3y + z = 2
by applying Gauss-Seidel method one time (using initial approximation as x - 0, y - 0, z - 0) will be:
- x = 2.32, y = 1.245, z = -3.157
- x = 1.25, y = -2.573, z = -3.135
- x = 2.45, y = -1.725, z = -3.565
- x = 3.5, y = -0.125, z = -4.625
Answer (Detailed Solution Below)
Option 4 : x = 3.5, y = -0.125, z = -4.625
Concept:
Gauss Seidel Method:
In Gauss Seidel method, the value of x calculated is used in next calculation putting other variable as 0.
2x - 5y + 3z = 7
Putting y = 0, z = 0 ⇒ x = 3.5
x + 4y - 2z = 3
Putting x = 3.5, z = 0 ⇒ y = - 0.125
2x + 3y + z = 2
Putting x = 3.5 , y = - 0.125 ⇒ z = 2 – 3(-0.125) – 2(3.5)
z = - 4.625
The value of\(\mathop \oint \nolimits_c \frac{1}{{{z^2} + 4}}dz\) Where C |z - 2i| = 1 is will be:
- 0
- 1/5
- π/2
- π /3
Answer (Detailed Solution Below)
Option 3 : π/2
Concept:
Cauchy's Integral Formula
If f(z) is analytic within and on a closed curve and ifais any point within C, then:
\(\mathop \smallint \limits_C^{} \frac{{f\left( z \right)}}{{z - a}}dz = 2\pi if\left( a \right)\)
Analysis:
Given:
\(f\left( z \right) = \smallint \frac{{{1}}}{{{z^2+4}}}dz\)
|z - 2i| = 1
|x + iy - 2i| = 1
|x + i(y - 2)| = 1
Taking the magnitude of the above, we get:
x2 +(y - 2)2= 1
This is the equation of a circle with:
Radius (r) = 1
Center = (0, 2)
Poles of f(z) = z2 + 4
z = (+2i, -2i)
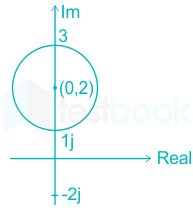
2i lies Inside the circle
-2i lies outside the circle
∴ We can write:
\(For\;pole\;\left( {z\; = \;-2i} \right) = \smallint \frac{{{1}}}{{\left( {z-2i} \right)\left( { z+2i} \right)}}dz = 0\)
Now, for pole z = 2i (lies inside the circle)
\(\smallint \frac{{{1}}}{{\left( {z+2i} \right)\left( {z-2i} \right)}}dz = 2\pi i{\left[ {\frac{{{1}}}{{2i+2i}}} \right]_{z = 2i}}\)
\(2\pi i\left[ {\frac{1}{4i}} \right] ={\frac{\pi}{2}}\)
Engineering Mathematics Questions And Answers
Source: https://testbook.com/objective-questions/mcq-on-engineering-mathematics--5eea6a0a39140f30f369dbdb
Posted by: rivasasaing.blogspot.com
0 Response to "Engineering Mathematics Questions And Answers"
Post a Comment